What are Behavior Trees?
Within AutoAPMS, the behavior tree paradigm is used for modeling robotic behaviors and task planning. We adopt the C++ implementation offered by BehaviorTree.CPP.
Generally speaking, behavior trees are composed of nodes (not ROS 2 nodes, but behavior tree specific nodes) that are assembled with respect to each other's position within the tree. They are considered the building blocks of a behavior tree. Various different types of nodes have been defined by different research results. We stick to the following definition:
| Node Type | Number of Children | Description |
|---|---|---|
| Control | At least 1 | Passes the tick to its children based on certain rules and takes each child's result status into account. |
| Decorator | Exactly 1 | Executes a certain function before or after passing the tick to its child. |
| Condition | Exactly 0 | Used for determining if a certain condition is met or not. |
| Action | Exactly 0 | Performs work in an synchronous or asynchronous manner. |
As you can see, Control and Decorator nodes are allowed to have nodes as children, so there is a parent-child relation. This property makes behavior trees hierarchically structured. When we speak of "ticking" a behavior tree node, it means that we invoke the tick callback function that is implemented by each node. This function always returns a status that must be one of the following:
| Status | Meaning |
|---|---|
| SUCCESS or FAILURE | The node finished executing and the respective job either succeeded or failed. |
| RUNNING | The node needs more time to determine the final result. This enables asynchronous execution. |
| SKIPPED | Special status for indicating that the parent node should not tick this node and proceed to the next one. |
With these definitions you are able to create complex task plans. For example the behavior tree from the installation example looks like this:
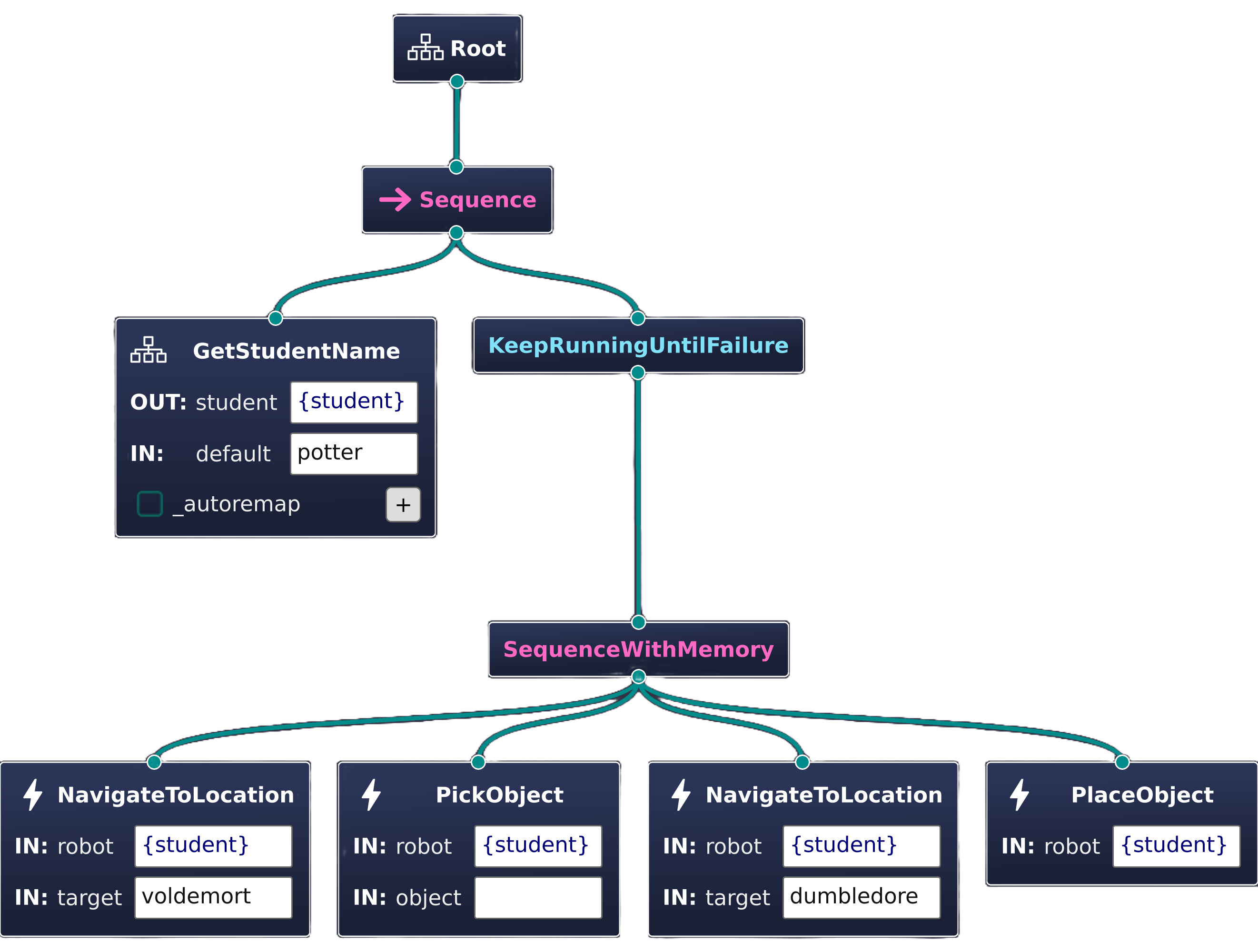
For more information about behavior trees and their C++ implementation, refer to the documentation of the BehaviorTree.CPP project.