 |
AutoAPMS
Resilient Robot Mission Management
|
|
AutoAPMS
Resilient Robot Mission Management
|
#include <filesystem>#include <iostream>#include <set>#include "auto_apms_core/exceptions.hpp"#include "auto_apms_core/resources.hpp"#include "auto_apms_core/util/string.hpp"#include "auto_apms_behavior_tree/node/node_manifest.hpp"#include "auto_apms_behavior_tree/resource/node_class_loader.hpp"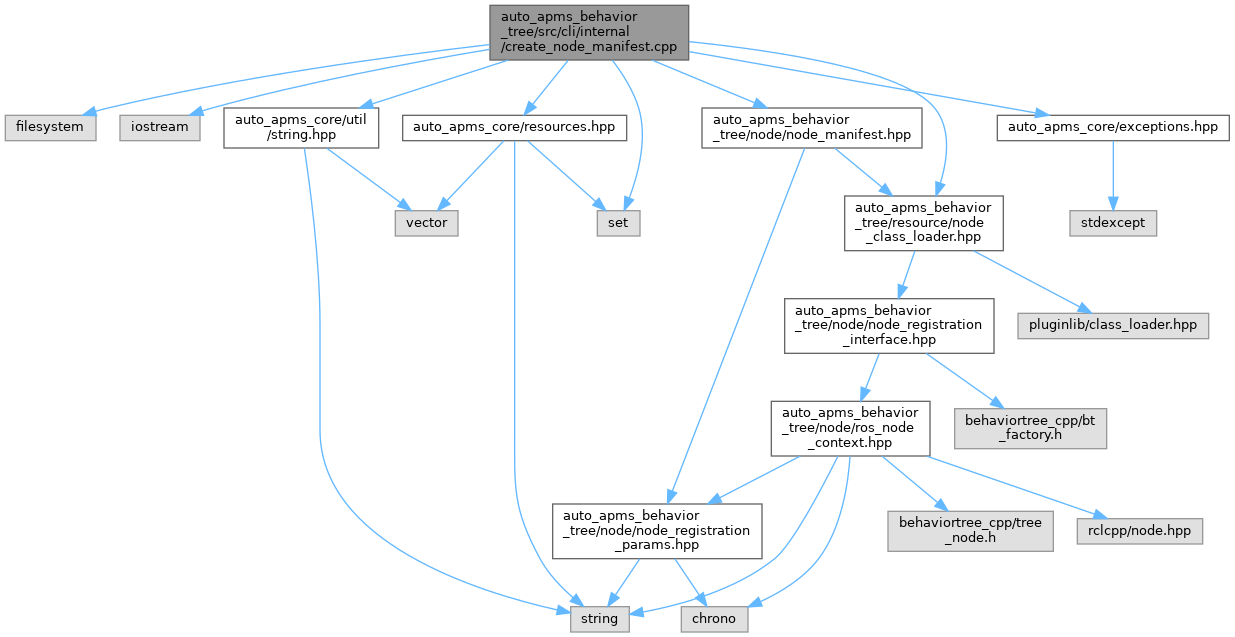
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
| int main | ( | int | argc, |
| char ** | argv ) |
Trying to construct NodePluginClassLoader will work completely fine during build time for all packages EXCEPT the original auto_apms_behavior_tree package. Will throw pluginlib::ClassLoaderException in this case, because the pluginlib::ClassLoader constructor initially checks wether the package containing the base class is installed. Therefore we MUST avoid triggering this script during build time of auto_apms_behavior_tree.
Definition at line 27 of file create_node_manifest.cpp.