 |
AutoAPMS
Resilient Robot Mission Management
|
|
AutoAPMS
Resilient Robot Mission Management
|
#include "auto_apms_behavior_tree/node/node_registration_interface.hpp"#include <boost/core/demangle.hpp>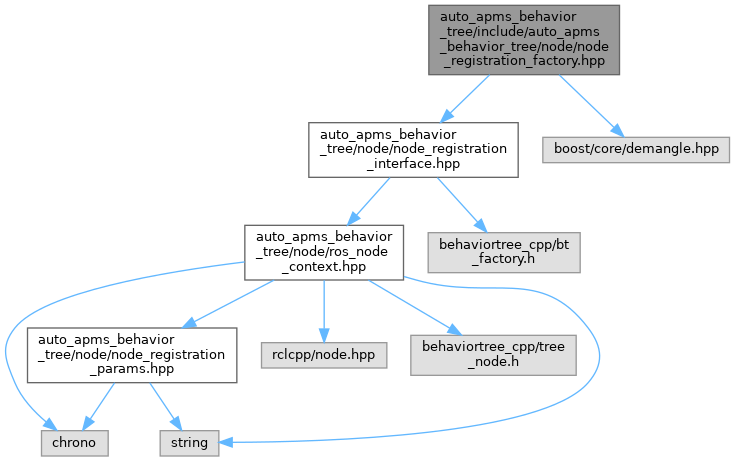

Go to the source code of this file.
Classes | |
| class | NodeRegistrationFactory< T, requires_ros_node_params > |
Namespaces | |
| namespace | auto_apms_behavior_tree |