 |
AutoAPMS
Resilient Robot Mission Management
|
|
AutoAPMS
Resilient Robot Mission Management
|
#include "auto_apms_behavior_tree/node/ros_action_node.hpp"#include "auto_apms_behavior_tree/node/ros_publisher_node.hpp"#include "auto_apms_behavior_tree/node/ros_service_node.hpp"#include "auto_apms_behavior_tree/node/ros_subscriber_node.hpp"#include "auto_apms_behavior_tree/node/node_registration_factory.hpp"#include "pluginlib/class_list_macros.hpp"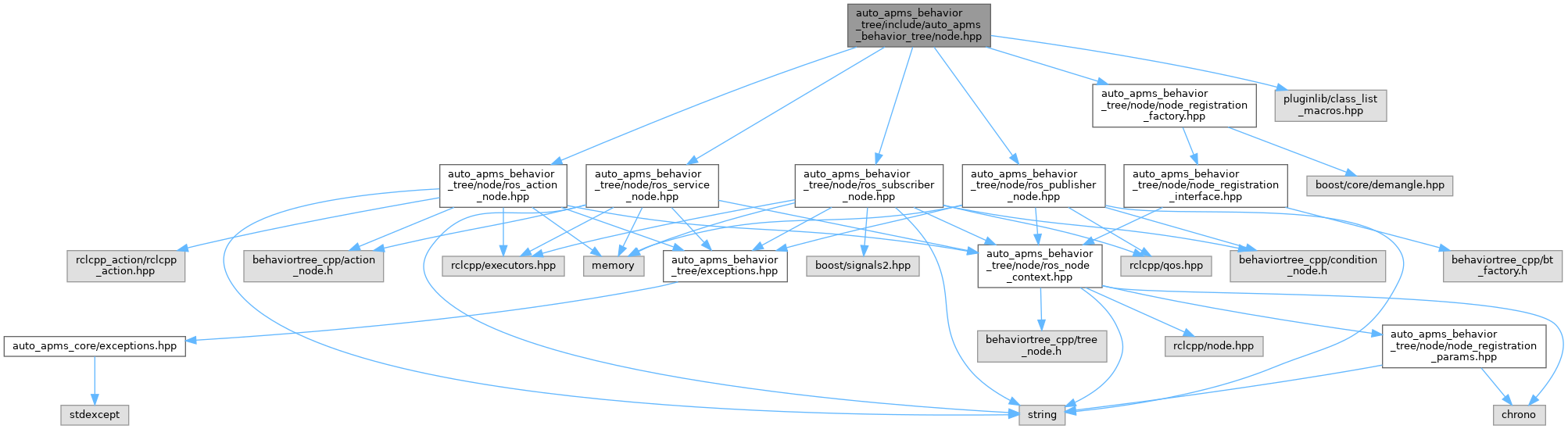

Go to the source code of this file.
Macros | |
| #define | AUTO_APMS_BEHAVIOR_TREE_REGISTER_NODE(type) |