 |
AutoAPMS
Resilient Robot Mission Management
|
|
AutoAPMS
Resilient Robot Mission Management
|
#include <Eigen/Geometry>#include "auto_apms_behavior_tree/node.hpp"#include "px4_msgs/msg/vehicle_global_position.hpp"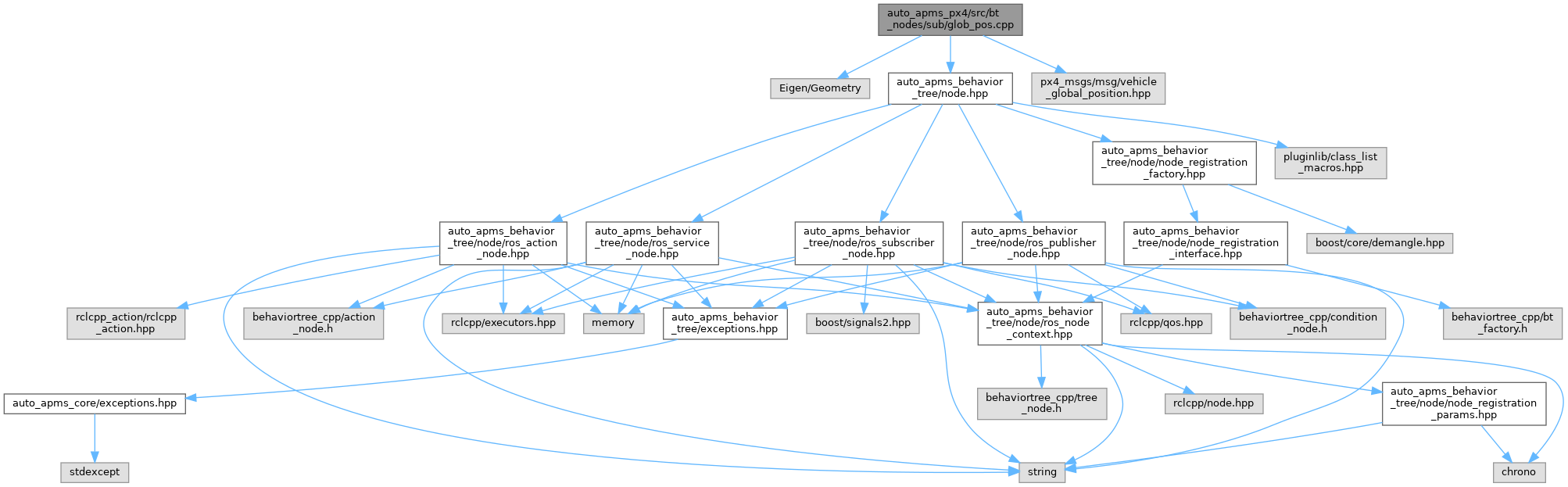
Go to the source code of this file.
Namespaces | |
| namespace | auto_apms_px4 |
Macros | |
| #define | OUTPUT_KEY_LAT "lat" |
| #define | OUTPUT_KEY_LON "lon" |
| #define | OUTPUT_KEY_ALT "alt" |
| #define | OUTPUT_KEY_POS "pos_vec" |
Typedefs | |
| using | GlobalPositionMsg = px4_msgs::msg::VehicleGlobalPosition |
| #define OUTPUT_KEY_LAT "lat" |
Definition at line 20 of file glob_pos.cpp.
| #define OUTPUT_KEY_LON "lon" |
Definition at line 21 of file glob_pos.cpp.
| #define OUTPUT_KEY_ALT "alt" |
Definition at line 22 of file glob_pos.cpp.
| #define OUTPUT_KEY_POS "pos_vec" |
Definition at line 23 of file glob_pos.cpp.
| using GlobalPositionMsg = px4_msgs::msg::VehicleGlobalPosition |
Definition at line 25 of file glob_pos.cpp.