 |
AutoAPMS
Resilient Robot Mission Management
|
|
AutoAPMS
Resilient Robot Mission Management
|
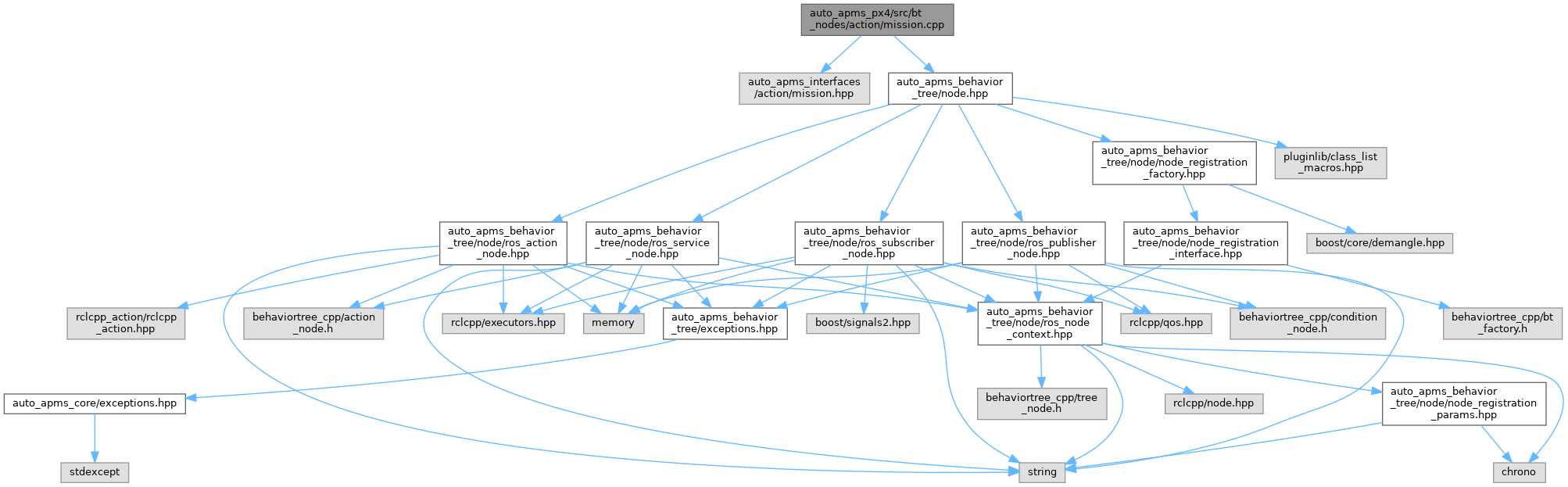
Go to the source code of this file.
Namespaces | |
| namespace | auto_apms_px4 |
Macros | |
| #define | INPUT_KEY_DO_RESTART "do_restart" |
| #define INPUT_KEY_DO_RESTART "do_restart" |
Definition at line 19 of file mission.cpp.