 |
AutoAPMS
Resilient Robot Mission Management
|
|
AutoAPMS
Resilient Robot Mission Management
|
#include <memory>#include <string>#include "rclcpp/executors.hpp"#include "rclcpp_action/rclcpp_action.hpp"#include "behaviortree_cpp/action_node.h"#include "auto_apms_behavior_tree/exceptions.hpp"#include "auto_apms_behavior_tree/node/ros_node_context.hpp"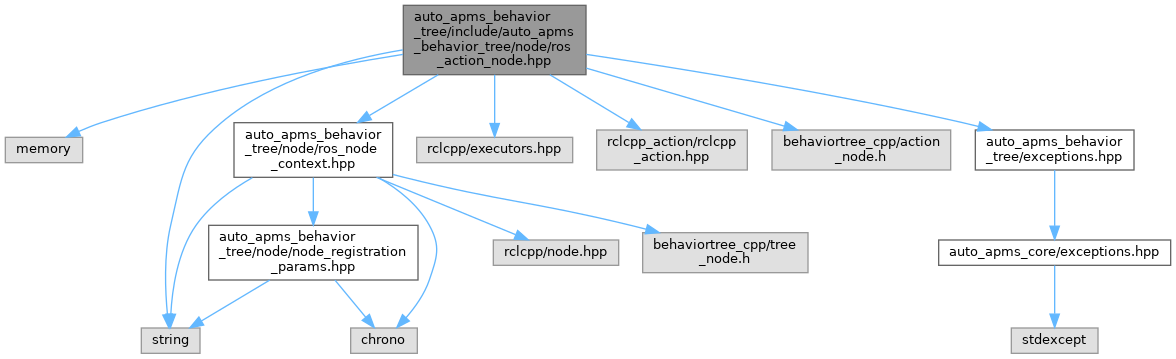

Go to the source code of this file.
Classes | |
| class | RosActionNode< ActionT > |
Namespaces | |
| namespace | auto_apms_behavior_tree |
Enumerations | |
| enum | ActionNodeErrorCode { SERVER_UNREACHABLE , SEND_GOAL_TIMEOUT , GOAL_REJECTED_BY_SERVER , INVALID_GOAL } |
Functions | |
| const char * | toStr (const ActionNodeErrorCode &err) |