 |
AutoAPMS
Resilient Robot Mission Management
|
|
AutoAPMS
Resilient Robot Mission Management
|
#include <functional>#include <future>#include "behaviortree_cpp/loggers/groot2_publisher.h"#include "rclcpp/node.hpp"#include "executor_params.hpp"#include "auto_apms_behavior_tree/executor/state_observer.hpp"#include "auto_apms_behavior_tree/definitions.hpp"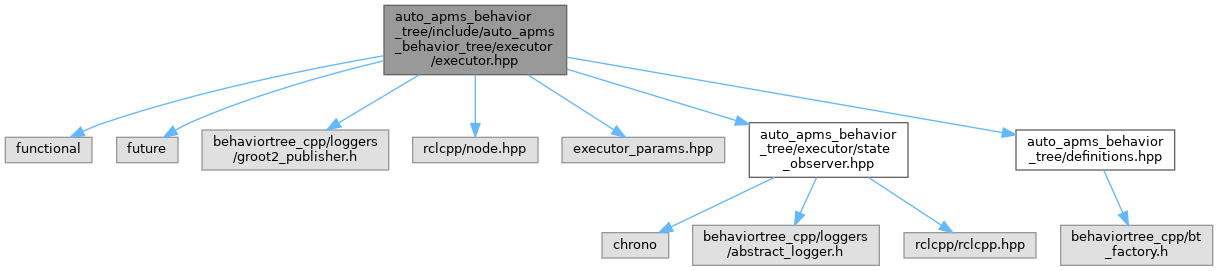
Go to the source code of this file.
Classes | |
| class | TreeExecutor |
Namespaces | |
| namespace | auto_apms_behavior_tree |
Functions | |
| std::string | toStr (TreeExecutor::ExecutionState state) |
| std::string | toStr (TreeExecutor::ControlCommand cmd) |
| std::string | toStr (TreeExecutor::TreeExitBehavior behavior) |
| std::string | toStr (TreeExecutor::ExecutionResult result) |