 |
AutoAPMS
Resilient Robot Mission Management
|
|
AutoAPMS
Resilient Robot Mission Management
|
#include "behaviortree_cpp/bt_factory.h"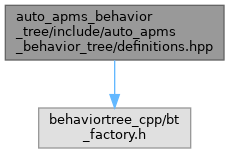
Go to the source code of this file.
Namespaces | |
| namespace | auto_apms_behavior_tree |
Typedefs | |
| using | Tree = BT::Tree |
| using | TreeBlackboard = BT::Blackboard |
| using | TreeBlackboardSharedPtr = std::shared_ptr<TreeBlackboard> |
Variables | |
| const char | BT_EXECUTOR_UPLOAD_TREE_SERVICE_NAME_SUFFIX [] = "/upload" |
| const char | BT_EXECUTOR_RUN_ACTION_NAME_SUFFIX [] = "/start" |
| const char | BT_EXECUTOR_COMMAND_ACTION_NAME_SUFFIX [] = "/command" |