 |
AutoAPMS
Resilient Robot Mission Management
|
|
AutoAPMS
Resilient Robot Mission Management
|
#include <signal.h>#include <chrono>#include "behaviortree_cpp/loggers/bt_cout_logger.h"#include "behaviortree_cpp/loggers/groot2_publisher.h"#include "rclcpp/rclcpp.hpp"#include "auto_apms_core/logging.hpp"#include "auto_apms_behavior_tree/executor/executor.hpp"#include "auto_apms_behavior_tree/builder/tree_builder.hpp"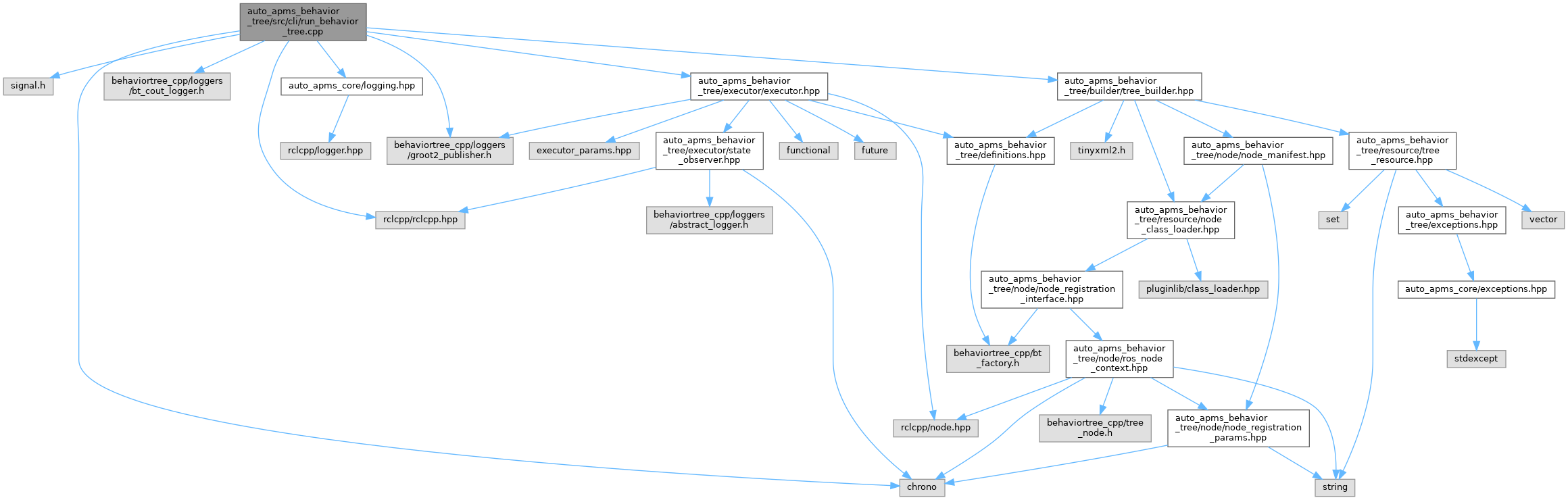
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
Variables | |
| sig_atomic_t volatile | termination_requested = 0 |
| int main | ( | int | argc, |
| char ** | argv ) |
Definition at line 31 of file run_behavior_tree.cpp.
| sig_atomic_t volatile termination_requested = 0 |
Definition at line 26 of file run_behavior_tree.cpp.