 |
AutoAPMS
Resilient Robot Mission Management
|
|
AutoAPMS
Resilient Robot Mission Management
|
#include <filesystem>#include <fstream>#include <iostream>#include "behaviortree_cpp/xml_parsing.h"#include "class_loader/multi_library_class_loader.hpp"#include "auto_apms_core/logging.hpp"#include "auto_apms_behavior_tree/node/node_manifest.hpp"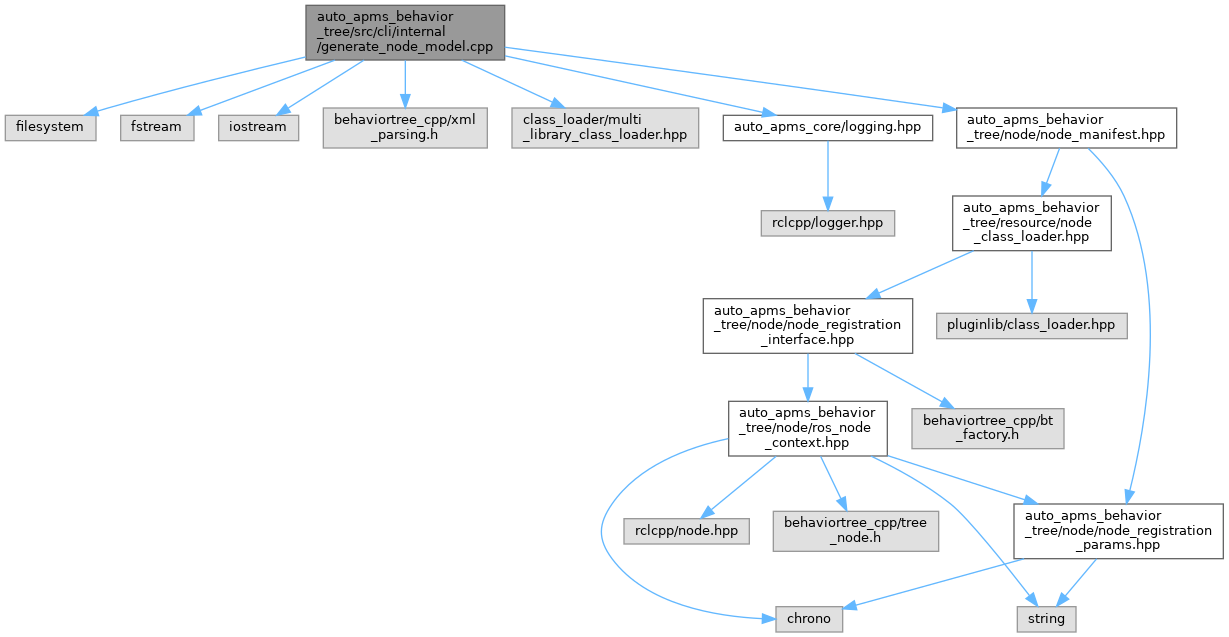
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
| int main | ( | int | argc, |
| char ** | argv ) |
NOTE: We have to use the low level class loader here because the pluginlib::ClassLoader API doesn't allow customizing the internal node/library allocation map.
Definition at line 26 of file generate_node_model.cpp.